An FTDI Pro board, also available from ckdevices, is required to interface the Mongoose board to your computer via USB for programming.
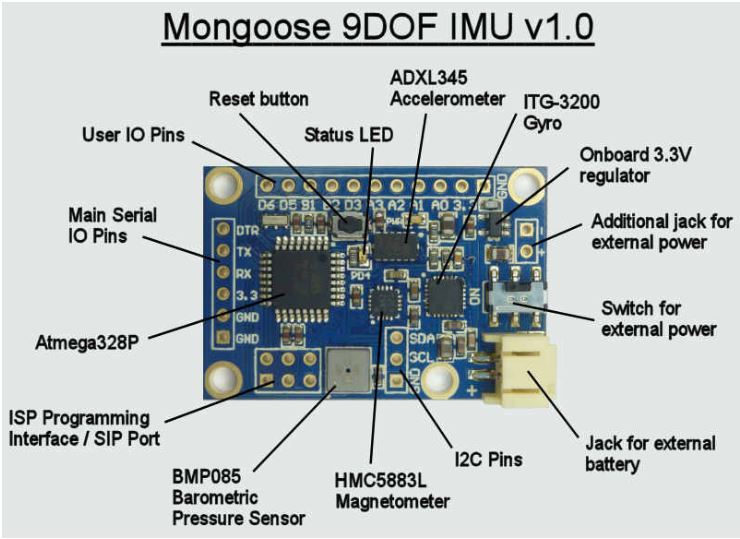
The software that has been developed for the UAV control will not work as is for measuring the position of a rocket in flight. For example, the accelerometer is used as a part of the system calibration. The 1 gee gravity field is sensed and is assumed to be "down". This does not hold for a rocket under high acceleration. So a lot of work is required to modify the software to work for this application.
The rate gyros can probably be made to work for this application, but it is not clear that the accelerometers can be used to get incremental position data. Theoretically, position is just a double integration of the acceleration data, but any small offset, or error, in the accelerometer reading "blows up" after two integration and swamps the actual change in location of the rocket. The error grows over time, so, the fact that the position is only being measured over 10's of seconds means this may be doable. But the presence of a 1 gee field that must be subtracted out of the data may make this impossible. A very small error in determining the direction of the gravity field makes the data unusable.
This is an ongoing project. I will post updates as I progress.